Obwohl Rotational Beamforming (RBF) eine performante Methode ist, können mehrere praktische Einstellungsfehler die Qualität der Ergebnisse erheblich beeinträchtigen. Um diese Probleme zu vermeiden, werden in dieser FAQ Ansätze zur Behebung der häufigsten Fehler beschrieben.
Fehlausrichtung der Array-Ebene
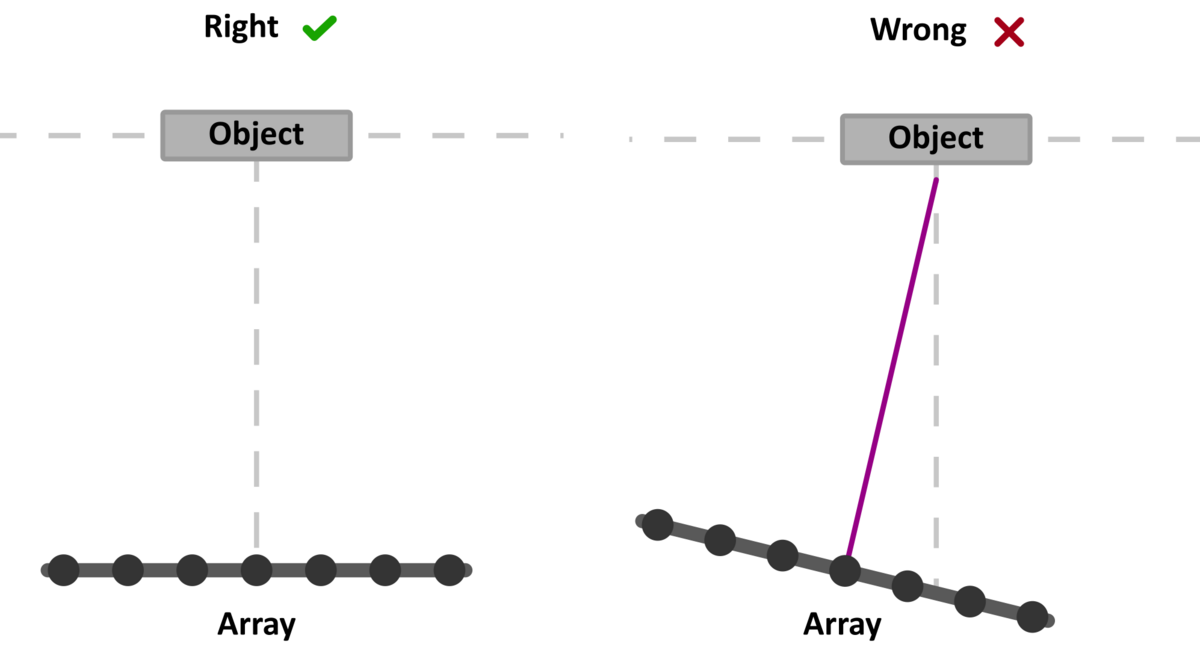
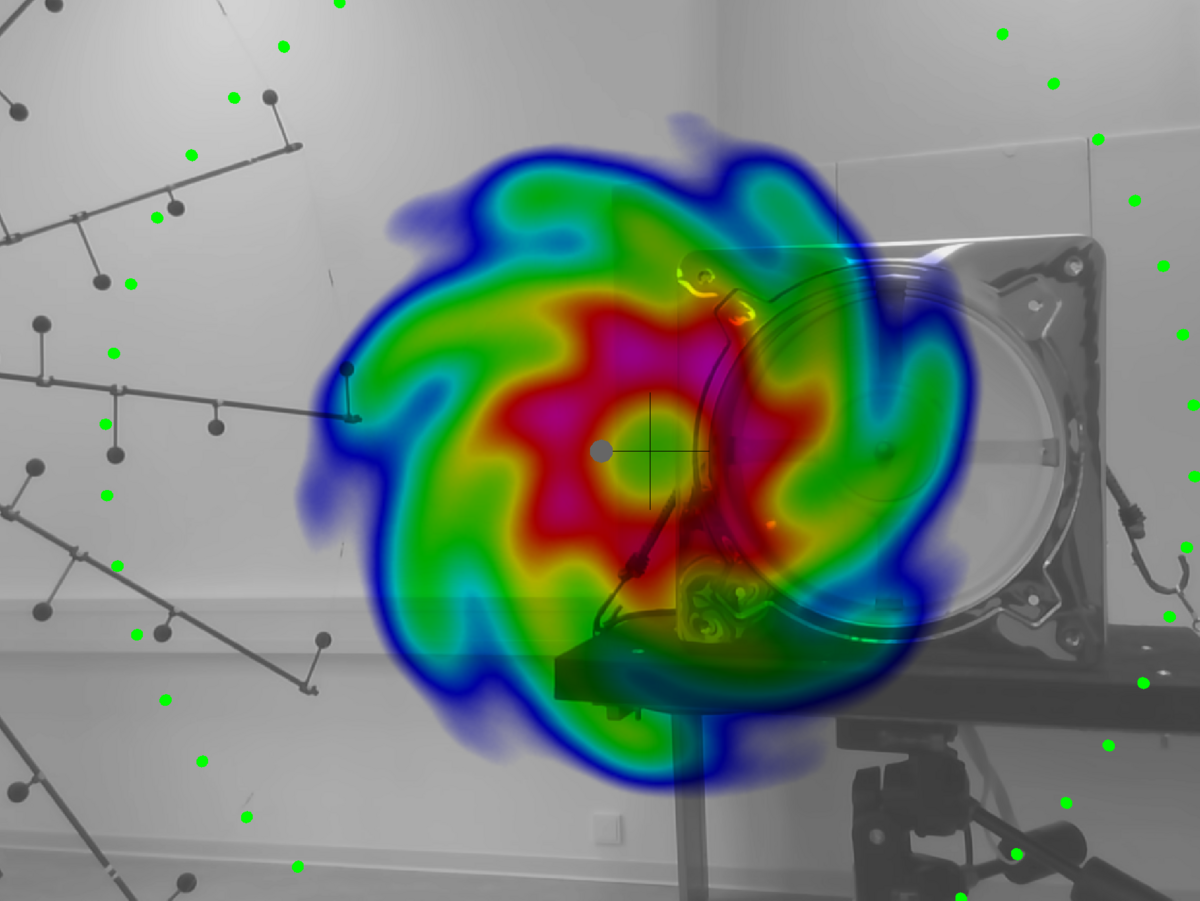
Eine wichtige Voraussetzung für das RBF ist die korrekte Ausrichtung des Arrays relativ zum Objekt. Das Array muss parallel zur Ebene des zu untersuchenden Objekts platziert werden. Abb. 1 zeigt die richtige und falsche Ausrichtung eines Mikrofon-Arrays in Bezug auf ein Objekt, während Abb. 2 die Auswirkungen einer Fehlausrichtung auf das Beamforming-Ergebnis veranschaulicht.
Fehlausrichtung der Arraymitte
Neben der planaren Fehlausrichtung ist ein weiteres häufiges Problem die falsche Zentrierung des Arrays relativ zum rotierenden Objekt.
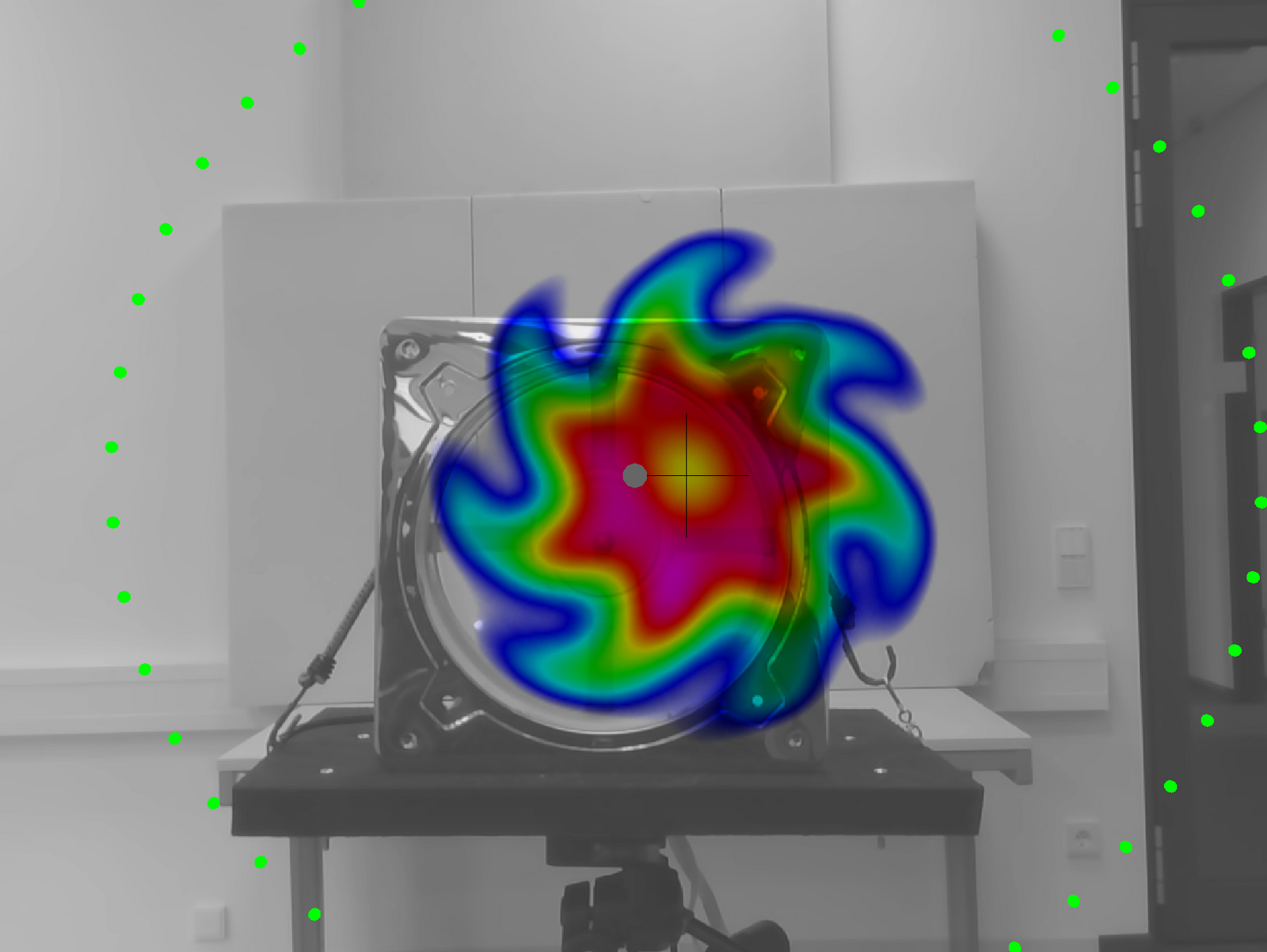
Wichtig: Das Koordinatenkreuz in Foto 2D (großes Kreuz über dem Bild) sieht zwar wie die Mittenanzeige des Arrays aus, bezieht sich jedoch in Wirklichkeit auf die Mitte des optischen Bildes der Akustikkamera. Deswegen, bietet NoiseImage eine praktische Methode der Zentrierung: Aktivieren Sie in der Messvorschau bei Foto 2D Ansicht die Option Array anzeigen, wodurch die Mitte des Arrays mit einem kleinen Kreuz angezeigt wird (siehe Abb. 2 und 4).
Wenn die Kamera des Arrays mittig montiert ist (z. B. Ring48), stimmen die Mitte des optischen Bildes und die Mitte des Mikrofonarrays auf dem Display überein und sind daher nicht zu unterscheiden. In Fällen, in denen die Kamera des Arrays exzentrisch montiert ist (wie beim Array Fibonacci96), ist es jedoch möglich, sie zu unterscheiden. Wenn ein großes Kreuz sichtbar ist, zeigt es die Mitte des optischen Bildes an, und die Mitte des Arrays wird sichtbar, sobald die Option Array anzeigenaktiviert wurde.
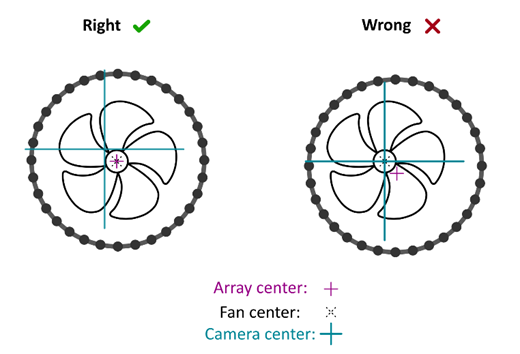
Zusammenfassend lässt sich sagen, dass die Zentrierung des Objekts auf den optischen Mittelpunkt zu Fehlern bei der virtuellen Transformation des Arrays (die durch den Rotationsfilteralgorithmus durchgeführt wird) führt. Abb. 3 zeigt die korrekte Zentrierung, während Abb. 4 den Effekt einer falschen Zentrierung darstellt.
Fehler im Zusammenhang mit Lasersensoren
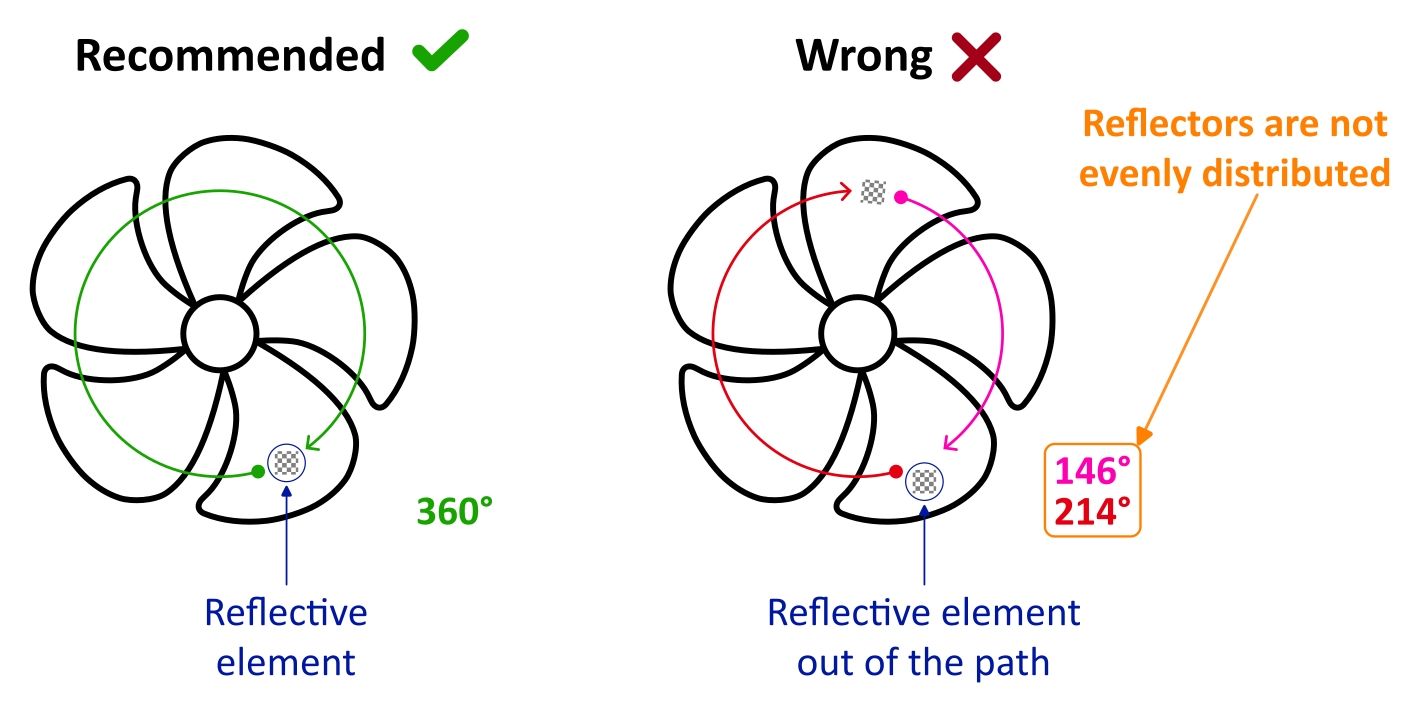
Wenn das Drehzahlsignal nicht direkt vom Objekt erfasst werden kann, kann ein externer Sensor, beispielsweise ein Lasersensor, verwendet werden. In diesen Fällen wird in der Regel ein reflektierendes Element an einem rotierenden Teil (z. B. einem Lüfterflügel) angebracht. Jedes Mal, wenn das Element den Laserstrahl durchgeht, wird ein Impuls erzeugt, anhand dessen das System die Drehzahl berechnen kann.
Ein häufiger Fehler bei der Verwendung dieses reflektierenden Elements besteht jedoch darin, mehrere Elemente zu verwenden, in der Annahme, dass dies die Genauigkeit erhöht. Tatsächlich verringert sich die Genauigkeit jedoch oft, wenn die Elemente nicht präzise über 360° verteilt sind. Abb. 5 zeigt ein Beispiel mit zwei Elementen, die nicht genau 180° voneinander entfernt sind, was zu ungenauen Drehzahlangaben führt.
Es empfiehlt sich, nur ein reflektierendes Element zu verwenden, zumal die meisten Lüfter eine ungerade Anzahl von Flügeln haben, was eine symmetrische Verteilung erschwert.
Schließlich können stark reflektierende Oberflächen (z. B. metallische Lüfterflügel) zu Fehlauslösungen und unregelmäßigen Drehzahlsignalen führen. Um dies zu vermeiden, sollten Sie Folgendes in Betracht ziehen:
- Aufbringen einer matten Beschichtung auf die reflektierenden Bereiche;
- Verwendung von Sprühfarbe, um die Reflektivität der Oberfläche zu verringern; oder
- Anpassung der Umgebungsbeleuchtung, um zu verhindern, dass unbeabsichtigte Reflexionen den Sensor auslösen.