The general idea is that resonant frequencies can be identified more easily by applying the same force level over the entire frequency range.
The width of the input force is controlled by the duration of the shock pulse. However, the shorter the duration of the impulse, the wider the frequency range response.
To control the input force frequency range, you can change the hammer tip in two ways:
- Hammer mass
Reducing the mass of the hammer tip causes the hammer to touch the structure for a shorter time because the reduced mass allows the hammer to reverse direction more easily after hitting the structure thus reducing the contact time.
- Hammer tip stiffness
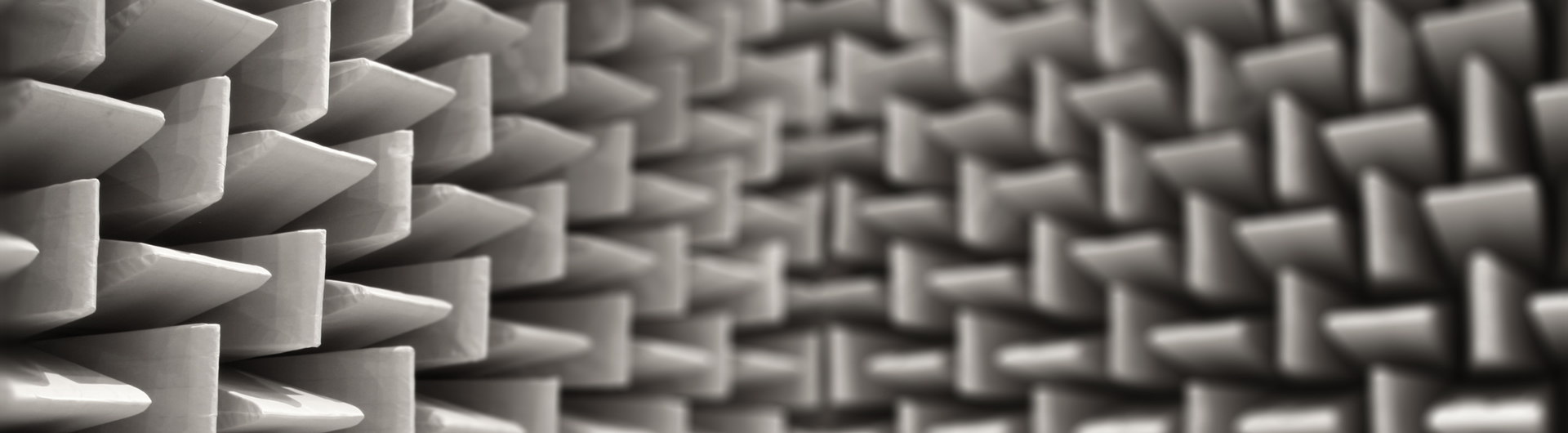
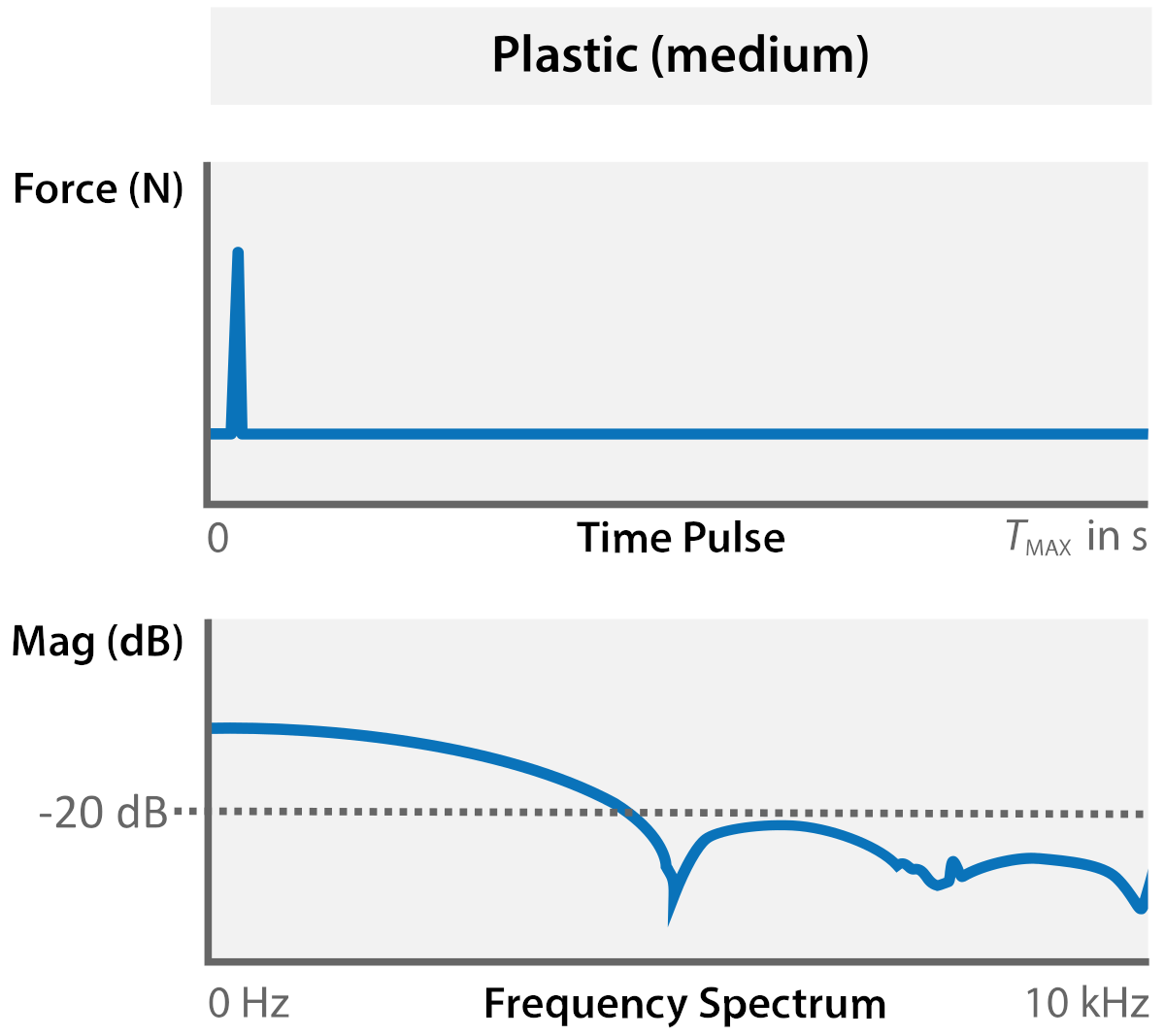
Increasing the stiffness of the tip also allows the hammer to shorten the time of contact. A rubber tip, for example, could be replaced by a metal tip.
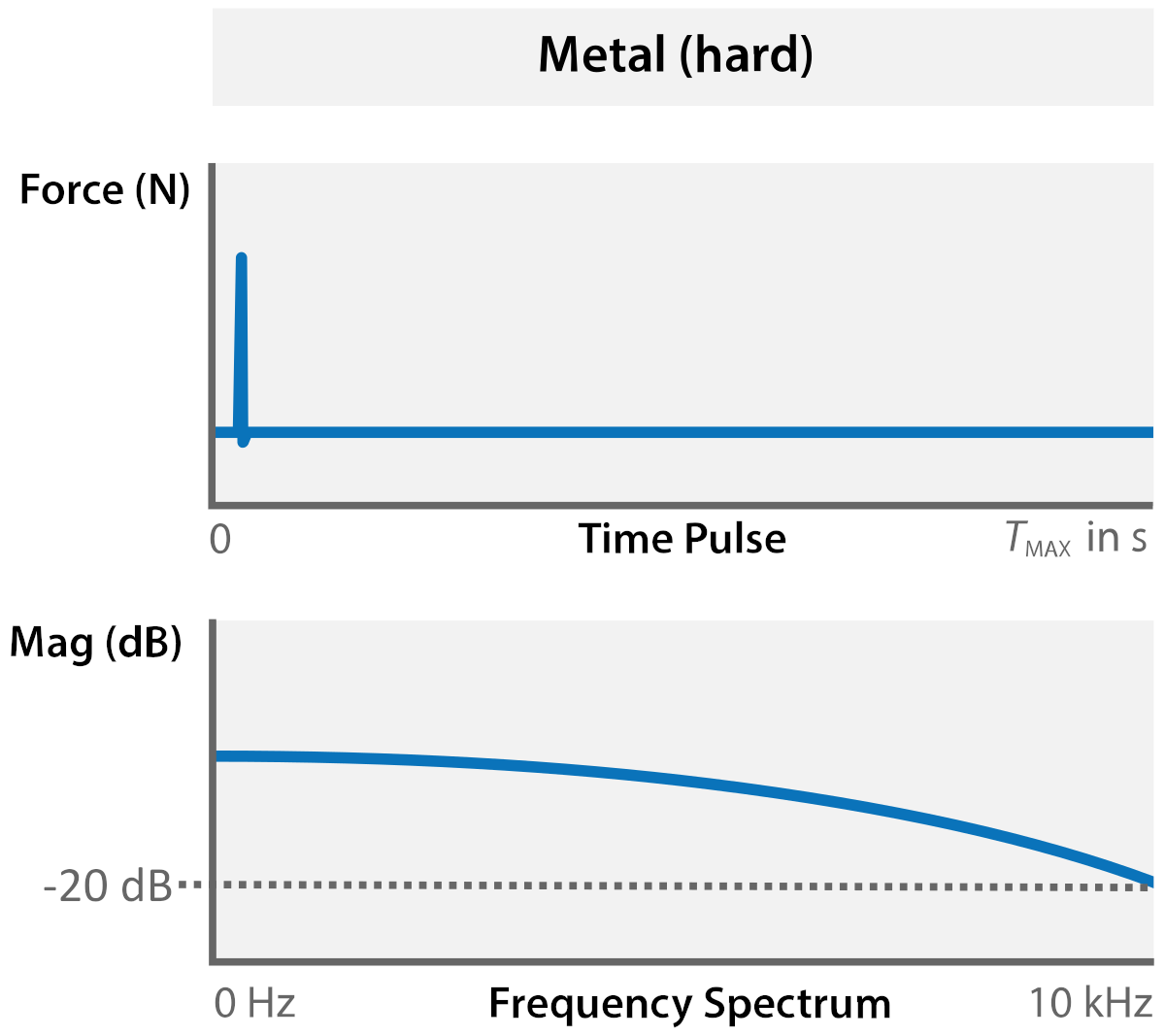
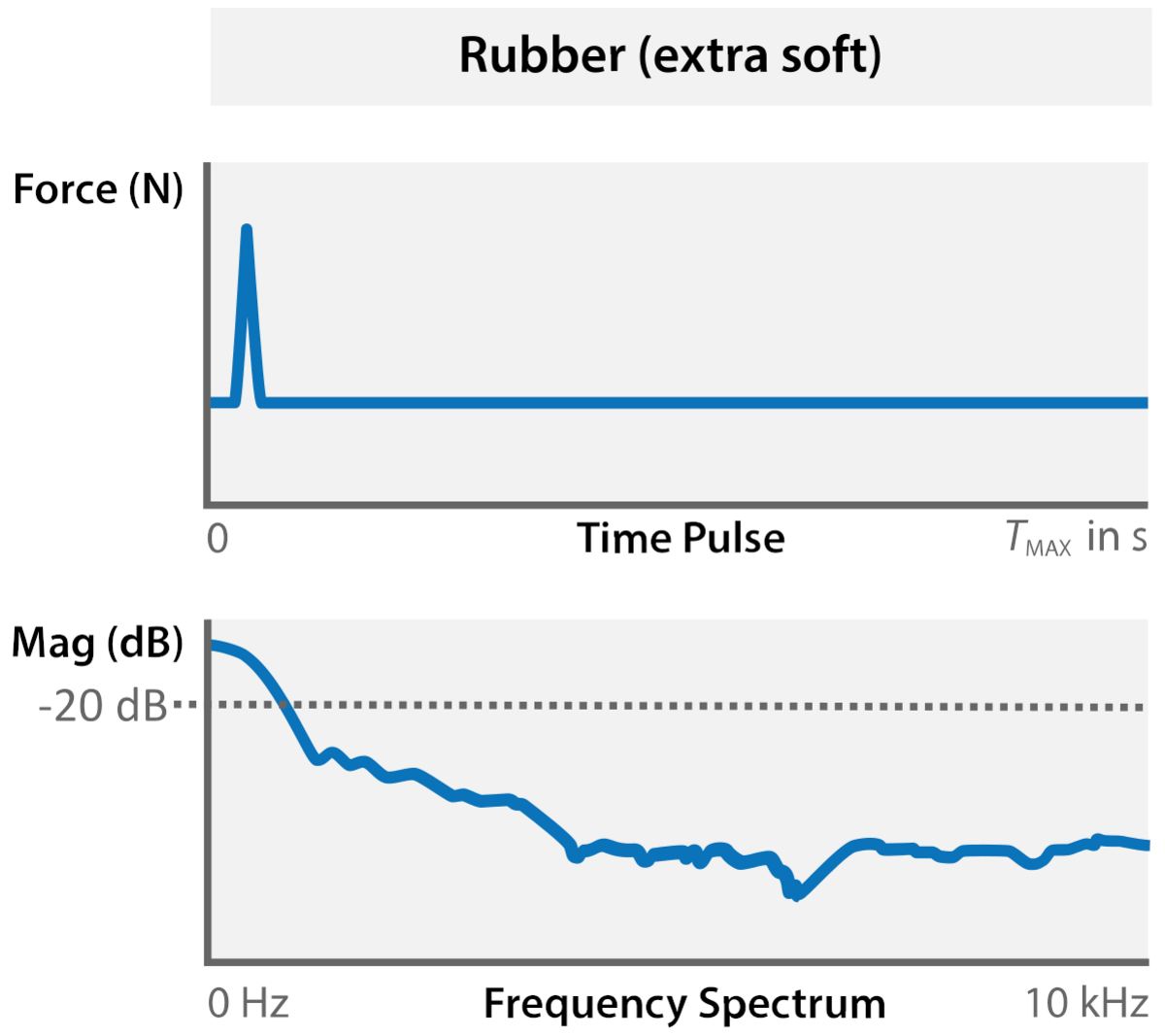
A hard tip has a very short pulse and excites a wide range of frequencies whereas a soft tip has a long pulse and excites a narrow frequency range. But the hammer tip itself does not completely determine the excited frequency range. The local flexibility of the structure must also be taken into account.
Generally applies: The lighter the hammer and the stiffer the tip, the higher the excited frequency range.
The images below present the choice of tips.