Impulse Hammer WaveHitMAX
The invention of the first smart impact hammer provides new ways of mechanical excitation for structural dynamic applications. Smart means that the device processes its signals internally. The modal hammer WaveHitMAX guarantees fully automatic, reproducible and high-precision excitation of the test object without double hits. The user can set the number of hits, impact force and the delay between hits accounting for different degrees of damping / delay times. All presettings like zero point or impact force search are made automatically by the hammer. Manual adjustment by the user is no longer necessary.
WaveHitMAX has new features compared to semi-automatic impact hammers. The advantages of internal signal processing are:
- Fully automatic single hits
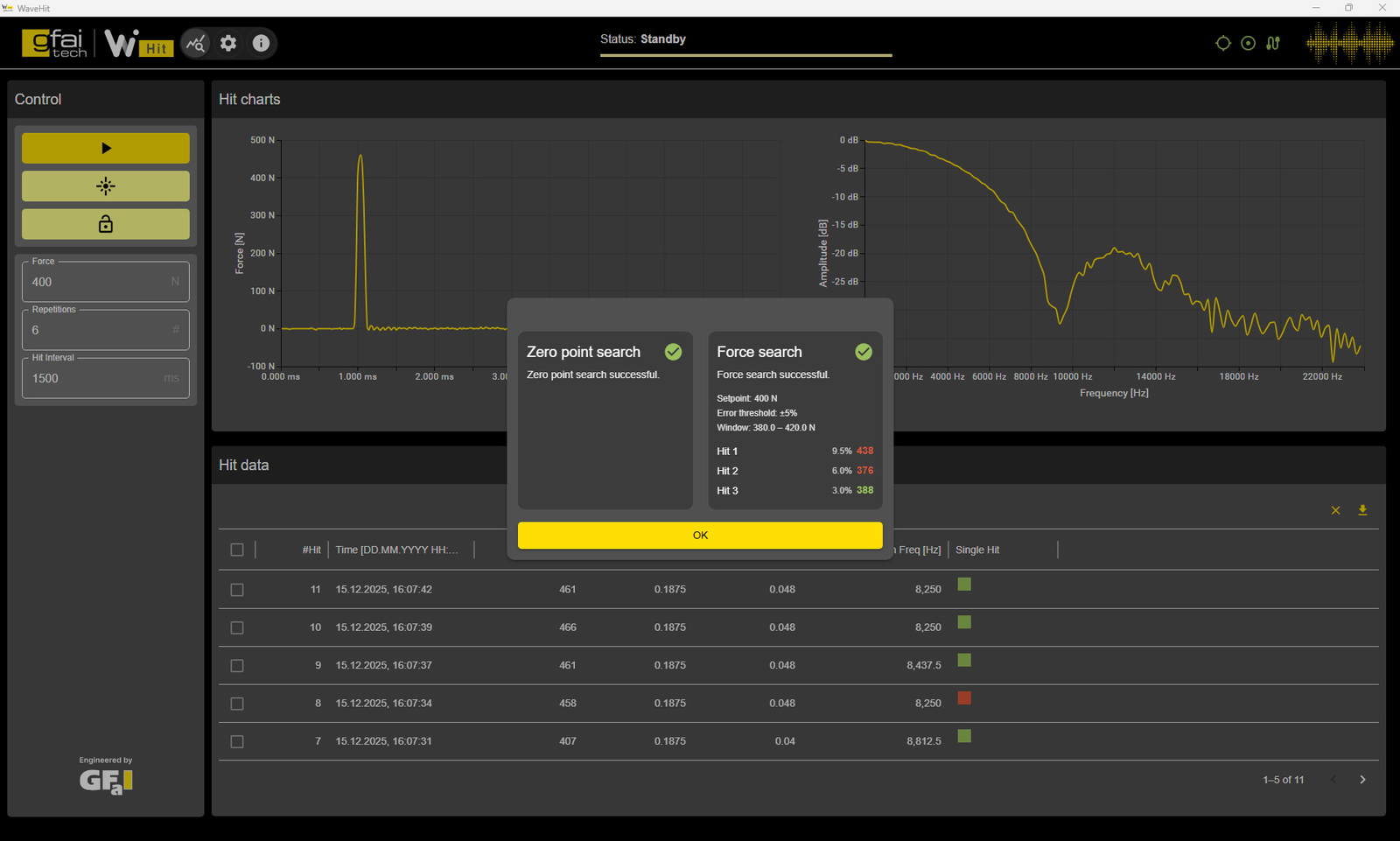
- Automatic search for user-defined impact force
- Automatic zero point search and new: possibility of manual zero-point setting for low-weight test objects
- Validation of the impact for quality assurance
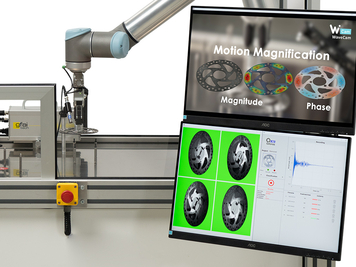
- Change of the position between hammer and test object without new setup
- NEW: two new operation modes: micro-hit mode and manual mode
The WaveHitMAX can be operated quickly and easily by the included software on a Windows enabled device (PC or tablet) through the Ethernet.
New Model: Impuls Hammer WaveHitMAX MK2.
Additional signal output for various applications.
In addition to the features of the new MK1, the WaveHitMAX MK2 offers the option of direct voltage output of the force sensor.
The type of signal output can be selected in the new MK2. In addition to the existing internal signal processing and analysing, the direct output of the force sensor's can be selected at the signal output. This feature provides following advantages:
- Lower noise level of the measurement signal
- Further analyses of the signal on external data recorders (e.g. for FRF calculations, Experimental Modal Analysis or Coherence Calculations)
- Possibility of external calibration of the hammer (DAkkS calibration, ILAC)
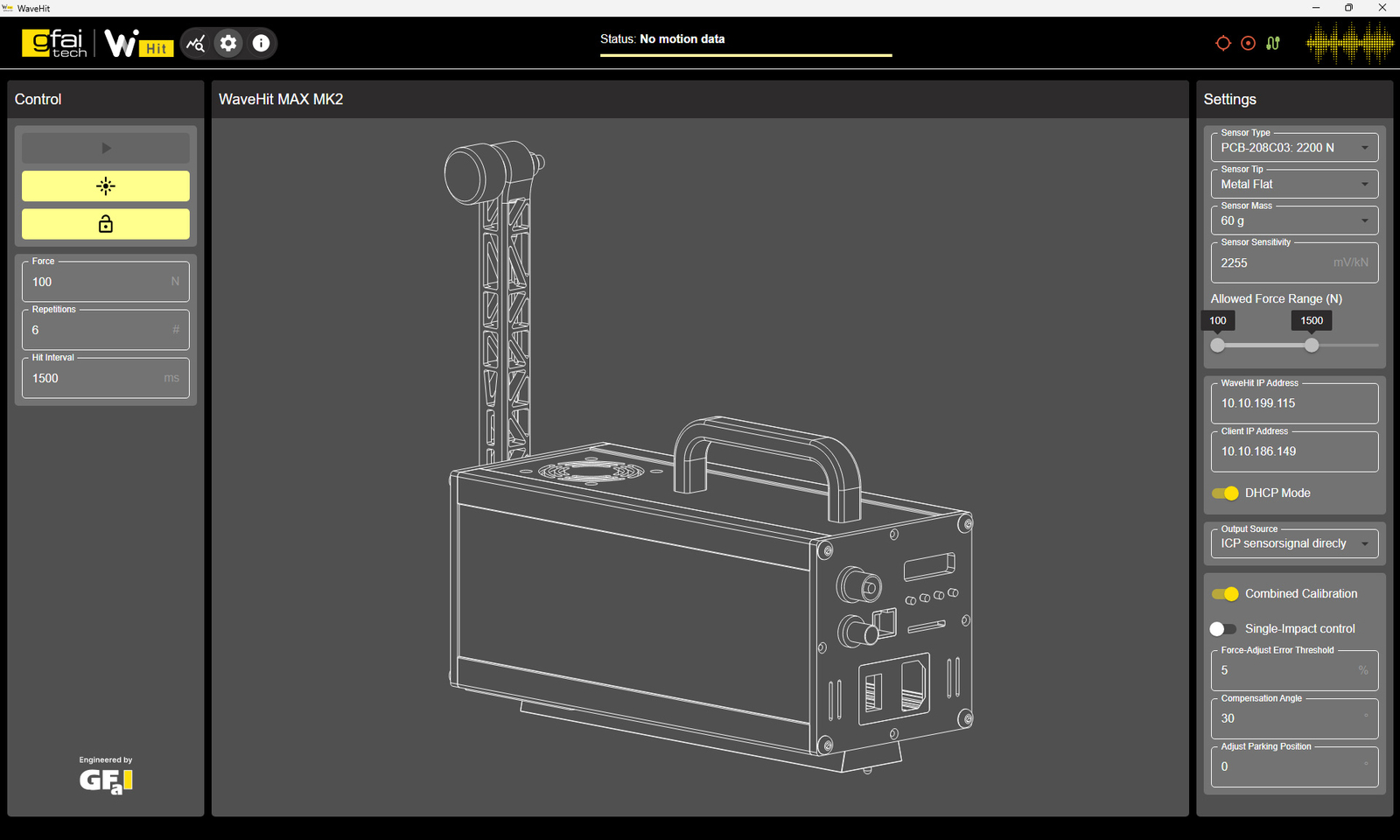
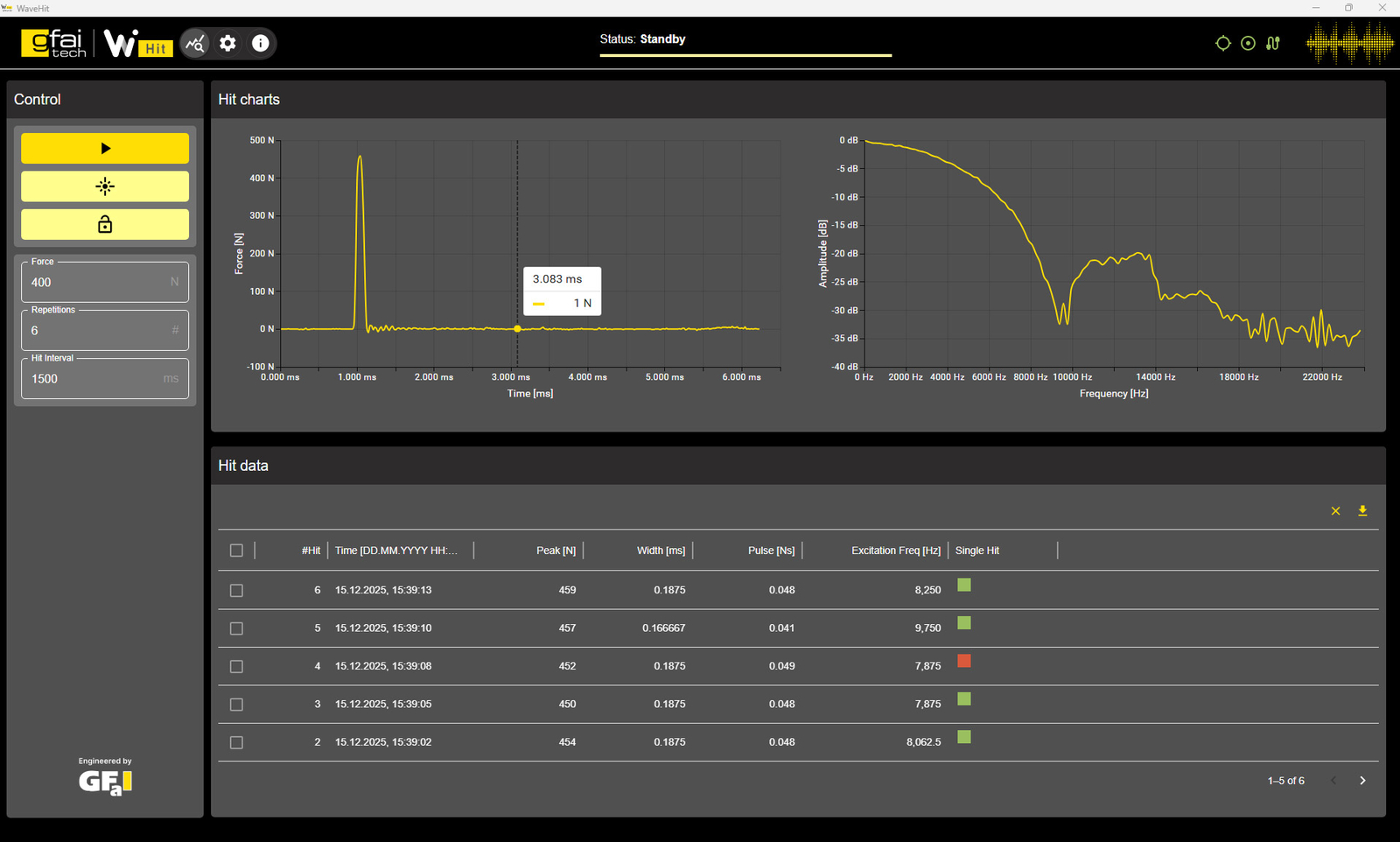
Software WaveHit
The included WaveHit software enables full control and configuration of the impulse hammer via an intuitive graphical user interface. Key features include automatic Ethernet connection, fully automated calibration (MK2 only), and real-time hit classification including Single-Hit detection in LDV mode. A CSV export function is also available, allowing seamless integration into external post-processing workflows.